Convolution#
Intuitive Understanding#
Convolution is a fundamental operation in signal processing and image processing. It combines two signals to produce a third signal that represents how the shape of one signal is modified by the other. Intuitively, convolution can be thought of as a way of “blending” one function with another.
Mathematical Formulation#
For continuous-time signals \( f(t) \) and \( g(t) \), convolution is defined as:
For discrete-time signals \( f[n] \) and \( g[n] \), convolution is given by:
Example 1: Continuous Convolution#
Step-by-Step#
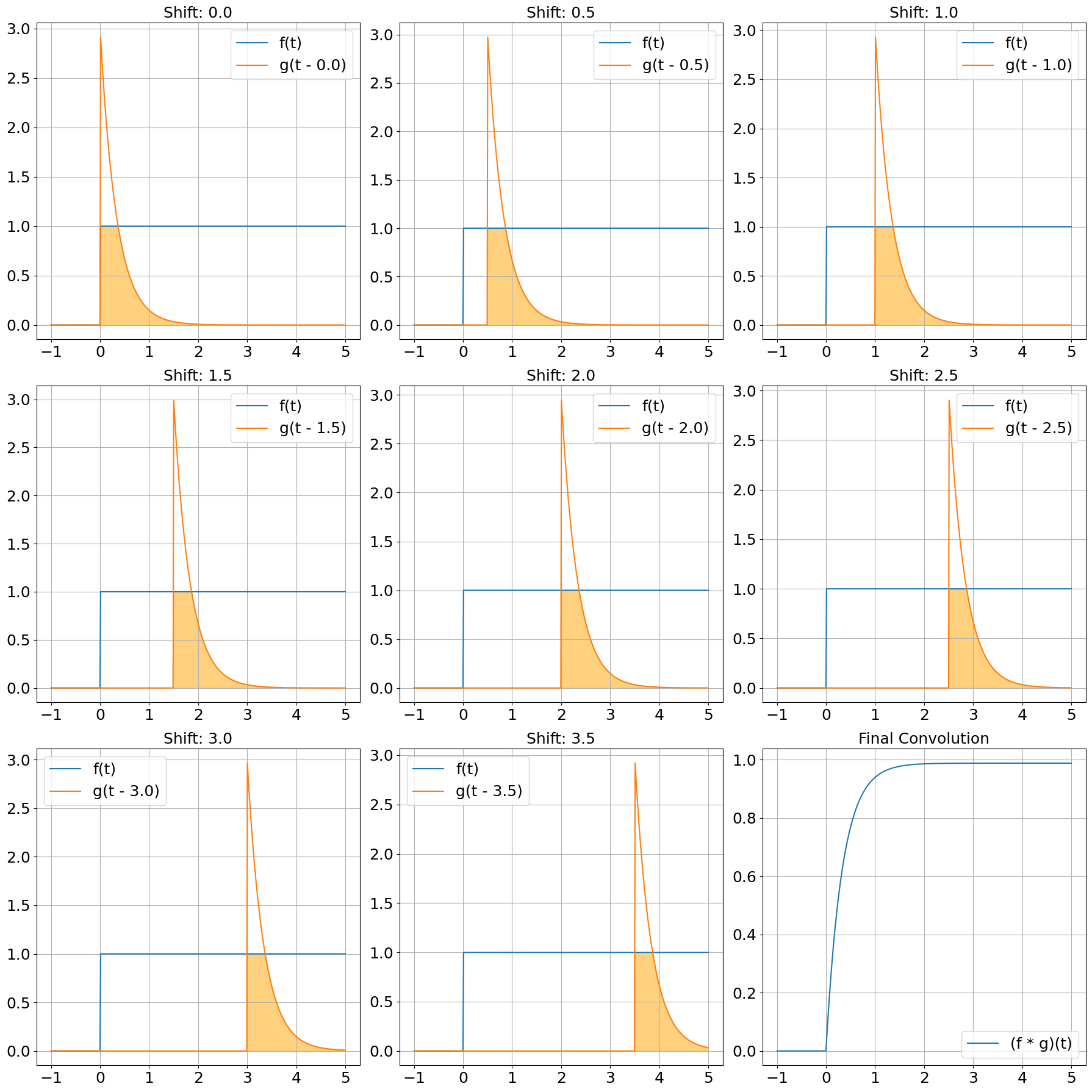
Consider the continuous functions:
The convolution \( (f * g)(t) \) is computed as follows:
Write down the definition:
Substitute the functions \( f(\tau) \) and \( g(t - \tau) \):
Determine the limits of integration based on \( g(t - \tau) \):
Evaluate the integral for different ranges of \( t \):
Graphical Illustration#
import numpy as np
import matplotlib.pyplot as plt
# Define the functions
def f(t):
return np.where(t >= 0, 1, 0) # Unit step function
def g(t):
return 3 * np.exp(-3 * t) * (t >= 0) # Exponential decay function
# Define the convolution function
def convolve(f, g, t):
result = np.zeros_like(t)
dt = t[1] - t[0]
for i in range(len(t)):
result[i] = np.sum(f(t[i] - t) * g(t) * dt)
return result
# Time array
t = np.linspace(-1, 5, 500)
# Perform convolution
y = convolve(f, g, t)
# Plotting
fig, axs = plt.subplots(3, 3, figsize=(18, 18))
# Font size
fontsize = 18
# Intermediate steps for visualization
shifts = [0, 0.5, 1, 1.5, 2, 2.5, 3, 3.5, 0]
for i, (ax, shift) in enumerate(zip(axs.flat, shifts)):
if i == 8:
ax.plot(t, y, label='(f * g)(t)')
ax.set_title('Final Convolution', fontsize=fontsize)
ax.legend(fontsize=fontsize)
else:
ax.plot(t, f(t), label='f(t)')
ax.plot(t, g(t - shift), label=f'g(t - {shift:.1f})')
ax.fill_between(t, 0, np.minimum(f(t), g(t - shift)), color='orange', alpha=0.5)
ax.set_title(f'Shift: {shift:.1f}', fontsize=fontsize)
ax.legend(fontsize=fontsize)
ax.tick_params(axis='both', which='major', labelsize=fontsize)
ax.grid(True)
plt.tight_layout()
plt.show()
Example 2: Discrete Convolution#
Step-by-Step#
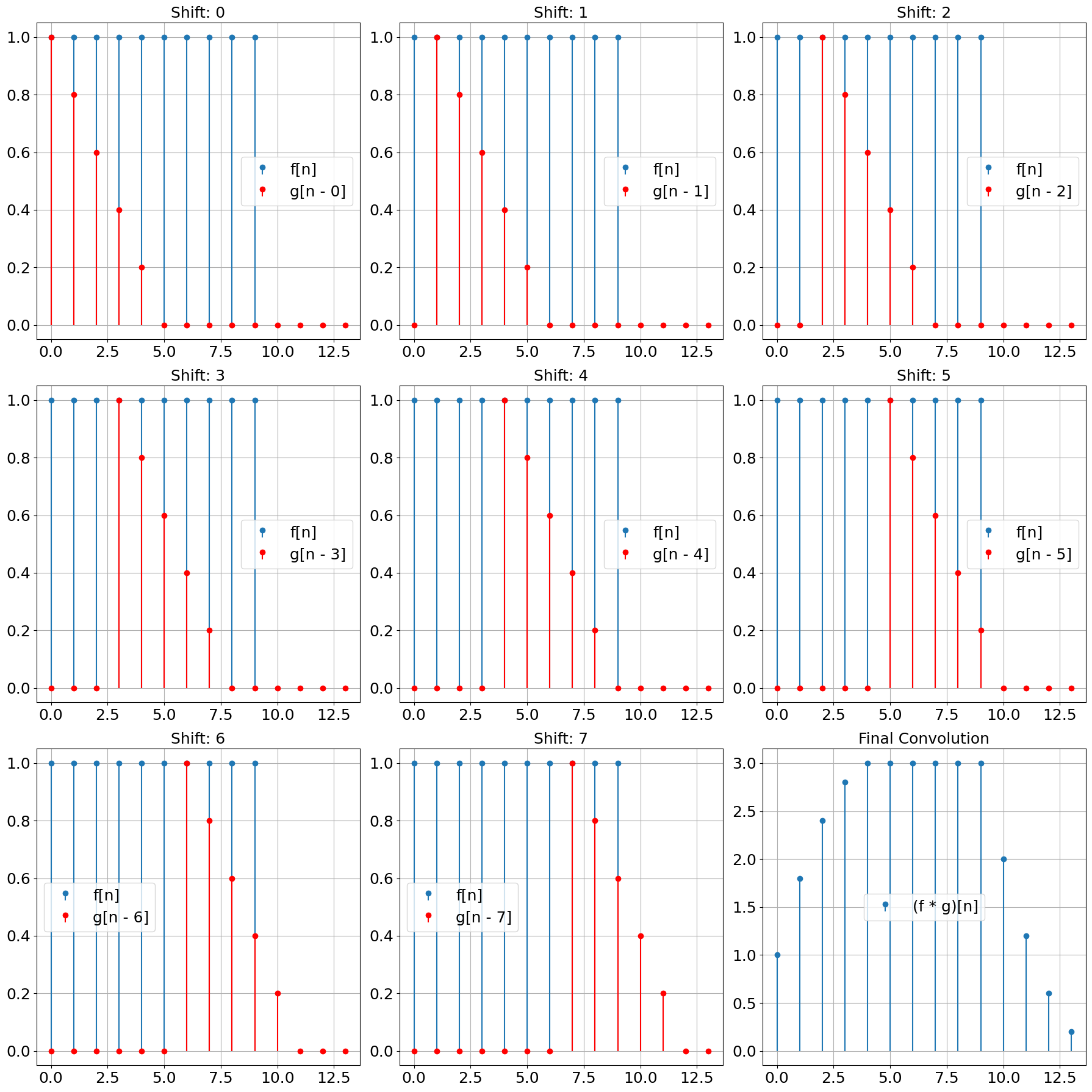
Consider the discrete signals:
The convolution \( (f * g)[n] \) is computed as follows:
Write down the definition:
Expand the signals and calculate each step:
For \( n = 0 \):
For \( n = 1 \):
For \( n = 2 \):
For \( n = 3 \):
For \( n = 4 \):
So, the resulting convolution is:
Graphical Illustration#
import numpy as np
import matplotlib.pyplot as plt
# Define the sequences
f = np.array([1, 1, 1, 1, 1, 1, 1, 1, 1, 1]) # Discrete unit step function
g = np.array([1, 0.8, 0.6, 0.4, 0.2]) # Discrete exponentially decaying function
# Perform convolution
conv_result = np.convolve(f, g)
# Plotting
fig, axs = plt.subplots(3, 3, figsize=(18, 18))
# Font size
fontsize = 18
# Intermediate steps for visualization
shifts = [0, 1, 2, 3, 4, 5, 6, 7, 8]
for i, (ax, shift) in enumerate(zip(axs.flat, shifts)):
if i == 8:
ax.stem(np.arange(len(conv_result)), conv_result, label='(f * g)[n]', basefmt=" ")
ax.set_title('Final Convolution', fontsize=fontsize)
ax.legend(fontsize=fontsize)
else:
if 0 <= shift < len(f):
ax.stem(np.arange(len(f)), f, label='f[n]', basefmt=" ")
shifted_g = np.zeros(len(f) + len(g) - 1)
if shift + len(g) <= len(shifted_g):
shifted_g[shift:shift+len(g)] = g
else:
shifted_g[shift:] = g[:len(shifted_g) - shift]
ax.stem(np.arange(len(shifted_g)), shifted_g, label=f'g[n - {shift}]', linefmt='r', markerfmt='ro', basefmt=" ")
ax.set_title(f'Shift: {shift}', fontsize=fontsize)
ax.legend(fontsize=fontsize)
ax.tick_params(axis='both', which='major', labelsize=fontsize)
ax.grid(True)
plt.tight_layout()
plt.show()
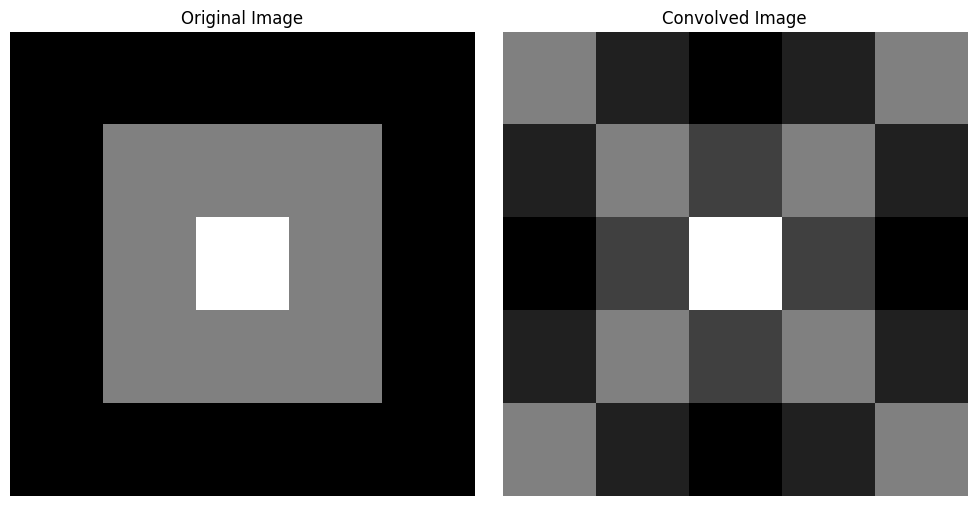
Example of Image Convolution#
Image convolution is a key operation in image processing and computer vision. It is used for various tasks such as edge detection, blurring, sharpening, and feature extraction.
Explanation#
In image convolution, a kernel (or filter) is applied to an image to produce a new image. The kernel is a small matrix that slides over the image and performs element-wise multiplication and summation to produce a new pixel value.
Example#
Consider a simple 3x3 kernel for edge detection:
This kernel highlights edges in the image by subtracting the surrounding pixel values from the center pixel value.
import numpy as np
import matplotlib.pyplot as plt
from scipy.signal import convolve2d
# Sample image (5x5 for simplicity)
image = np.array([[10, 10, 10, 10, 10],
[10, 20, 20, 20, 10],
[10, 20, 30, 20, 10],
[10, 20, 20, 20, 10],
[10, 10, 10, 10, 10]])
# Define the kernel
kernel = np.array([[-1, -1, -1],
[-1, 8, -1],
[-1, -1, -1]])
# Perform convolution
conv_image = convolve2d(image, kernel, mode='same')
# Plotting
fig, axs = plt.subplots(1, 2, figsize=(10, 5))
# Original image
axs[0].imshow(image, cmap='gray')
axs[0].set_title('Original Image')
axs[0].axis('off')
# Convolved image
axs[1].imshow(conv_image, cmap='gray')
axs[1].set_title('Convolved Image')
axs[1].axis('off')
plt.tight_layout()
plt.show()
Importance of Image Convolution#
Image convolution is crucial in various applications:
Edge Detection: Highlights edges in images, useful for object detection and recognition.
Blurring: Reduces noise and detail, useful in preprocessing.
Sharpening: Enhances details, useful for improving image quality.
Feature Extraction: Extracts important features for machine learning and computer vision tasks.
In summary, convolution is a versatile tool in both signal processing and image processing, providing a mathematical framework for understanding and manipulating signals and images.